Tudományos cikk a mezőgazdasági erőgépek automatikus kormányzásának pontossági vizsgálatáról
Mezőgazdasági erőgépek automatikus kormányzásának pontossági vizsgálata
Riczu Péter1 – Mesterházi Péter Ákos2 – Fórián Tünde3 – Fehér Gábor4 – Bíró János5 – Tamás János6
1Ph.D hallgató, Debreceni Egyetem, AGTC MÉK, Víz- és Környezetgazdálkodási Intézet, [email protected];
2c. egyetemi docens, Nyugat-Magyarországi Egyetem, MÉK, Biológiai Rendszerek Műszaki Intézete, [email protected];
3Tanszéki mérnök, Debreceni Egyetem, AGTC MÉK, Víz- és Környezetgazdálkodási Intézet, [email protected]
4Ph.D hallgató, Budapesti Műszaki és Gazdaságtudományi Egyetem, Szélessávú Hírközlés és Villa-mosságtan Tanszék, [email protected];
5GPS termékek műszaki menedzsere, IKR Zrt., [email protected];
6egyetemi tanár, Debreceni Egyetem, AGTC MÉK, Víz- és Környezetgazdálkodási Intézet, [email protected]
5GPS termékek műszaki menedzsere, IKR Zrt., [email protected];
6egyetemi tanár, Debreceni Egyetem, AGTC MÉK, Víz- és Környezetgazdálkodási Intézet, [email protected]
ABSTRACT
GPS positioning is the foundation of the precision farming or rather site-specific plant production technology. Positioning accuracy plays a key function both from technical and economic aspects. The authors investigated the effect of GPS accuracy upgrade on positioning accuracy in practice.
For this purpose, the steering accuracy of a Trimble Autopilot hydraulic robot pilot system (controlled by a Trimble FmX display) installed in a New Holland T 6030 tractor was investigated. Test runs were done in a real field in the four cardinal directions. Test runs were done without correc-tion, or rather using EGNOS, OmniStar VBS, OmniStar HP, and RTK corrections both from own base and GNSS network. The average steering error (offline distance) was defined in case of each run and the accuracies of steering using different corrections were compared. The effect of driving direc-tion on accuracy with regard to the given correction signals was analysed as well.
Bevezetés
A precíziós (vagy más néven helyspecifikus) gazdálkodás egyre elterjedtebbé válik Közép- és Kelet-Európában, ugyanakkor az utóbbi évek-ben Nyugat-Ázsiában és Dél-Afrikában is megjelent. Ennek a széles körű elterjedésnek az elsődleges oka az egyes mezőgazdasági műveletek hatékonyságának, és a termés minőségének a növekedése. A gazdasági előnyök mellett a pontosan szabályozott, precíziós vegyszerhasználat és az üzemanyag megtakarítás pozitív hatást gyakorol környezetünkre, csökkenti annak terhelését.
Bevezetés
A precíziós (vagy más néven helyspecifikus) gazdálkodás egyre elterjedtebbé válik Közép- és Kelet-Európában, ugyanakkor az utóbbi évek-ben Nyugat-Ázsiában és Dél-Afrikában is megjelent. Ennek a széles körű elterjedésnek az elsődleges oka az egyes mezőgazdasági műveletek hatékonyságának, és a termés minőségének a növekedése. A gazdasági előnyök mellett a pontosan szabályozott, precíziós vegyszerhasználat és az üzemanyag megtakarítás pozitív hatást gyakorol környezetünkre, csökkenti annak terhelését.
Blackmore S. (1999) szerint a precíziós mezőgazdaság nem csak egy technológia, sokkal inkább egy menedzsment folyamat része. Több példát említ, miszerint a precíziós mezőgazdaság megvalósításához nincs szükség új technikák, vagy technológiai elemek beszerzéséhez. Azonban az intenzív szántóföldi gazdálkodás alapját a high-tech berendezések jelentik, melyek jelentős beruházás igényelnek. Hasonló véleményt formált Neményi M. et al, (1998) és Győrrfy B. (2000), akik szerint a precíziós gazdálkodás a mezőgazdasági gépek fejlesztését, vagy azok kiegészítését jelenti. A helyspecifikus technológiák alapját a műholdas rendszer alapú helymeghatározás biztosítja. Mindig az adott mezőgazdasági művelet határozza meg a hasznát és alkalmazott GPS rendszerek pozicionálási pontosságát, ugyanak-kor sok esetben a korrekciós jelek költségei az elsődleges korlátozó tényezők. Műtrágyázás vagy növényvédő szeres kezelés esetében elegendő egy 15-20 cm-es csatlakozási (pass-to-pass) pontosság, ugyanakkor sorba vetésnél, vagy kultivátorozásnál kb. 2,5 cm-es pontosság az elfogadható. A 15-20 cm-es csatlakozási pontosságról (EGNOS) 6-10 cm-re (OmniStar) történő fejlesztés kb. 1 500 euróba kerül, míg a 2,5 cm-es csatlakozási és visszatérési (year-to-year) pontosság (RTK korrekció) megközelítőleg 4 600 euró plusz költséget jelent. Tekintettel a költségekre, illetve az egyes szántóföldi műveletekhez szükséges pontosságra, felmerül a kérdés, hogy a fent említet helymeghatározási pontosság milyen mértékben realizálható az erőgépek automatikus kormányzásának szintjén. A precíziós mezőgazdaságra való technológiai berendezkedés nagymértékben befolyásolja a termelés költségeit és profit alakulását (Tamás J., 2001), de ezen kívül alapvetően befolyásolja a jövedelemviszonyokat a megfelelő korrekciós tényező kiválasztása is.
A különböző GPS korrekciós jelek elérhetőségét és pontosságát már számos kutatás során vizsgálták (Tamás J., Lénárt Cs., 2003; Tiberius C., Verbree E., 2004; Noack P. O., Muhr T., 2008; Eissfeller B. et al, 2011).
Tuchband T. (2008) a precíz abszolút helymeghatározás (precise point positioning – PPP) módszerének alkalmazásával elemezte az abszolút és relatív helymeghatározás pontosságát kód- és fázismérések használata során. További kísérleteket végzett a helymeghatározási hibák meghatározása céljából különböző tényezőket (ionoszféra, órahibák, pályamodellek) vizsgálva.
Ezek a vizsgálatok nagyon fontosak, hogy megismerjük a helymeghatározás pontosságát befolyásoló tényezőket, illetve megismerjük azok hatásának mértékét. Azonban a mezőgazdaságban használt GPS vevők működési módja a fentiektől nagymértékben eltér. Baio F. H. R. (2012) összehasonlította a cukornád betakarító kombájn kézi és automatikus kormányzás navigációs pontosságát. Megállapította, hogy a kormányzás pontossága nőtt mind nappali, mind éjszakai használatnál, de a területteljesítményt illetően nem láttak növekedést. Hudson G. et al, (2007) egy átfogó tanulmány keretében vizsgálta három különböző traktorvezetési metódus (habjelzés, LED-soros párhuzamvezető, dörzskerekes kormányzási rendszer) pontosságát (átlagos és RMS hiba, a hiba szórása). Méréseit két különböző haladási sebesség esetén (5,6 km/h és 11,5 km/h) végezte el. Az eredmények azt mutatták, hogy a habjelzéses módszer pontatlanabb volt a másik két módszerhez képest; továbbá megállapították, hogy az eltérő sebességgel történt mérés az átlagos és az RMS hiba tekintetében nem okozott szignifikáns eltérést. A szerzők eredménye alapján a nagyobb haladási sebesség megnövelte mindkét hiba értékét a habjelző és a dörzskerekes kormányzási rendszer esetében, míg a LED-soros vezetés csökkentette a pontatlanságot. Adamchuk V. I. et al, (2008) kísérleteiben vizsgálták a GPS vevők pozicionálási pontosságát. A GPS vevők egy I-profilú vasgerendán futottak miközben folyamatosan rögzítették azok pozícióját, de mérték az automatikus kormányzási rendszer pontosságát szántóföldi kísérletekben is. Az általuk használt tesztjárműre vizuális szenzorokat és egy potenciométer alapú rendszert felszereltek fel. Abidine A. Z. et al, (2004) hasonló vizsgálatokat végzett, csak éppen gyakorlati megközelítésben. A szerzők egy osztott parcellás (split-plot) kísérletet állítottak be, melynek keretében RTK robotpilóta rendszerrel vezérlet traktort használtak. A kísérlet során értékelték a kormányzási pontosságot és mérték a traktor működése közbeni növényi károsodás mértékét. A szerzők eredménye bizonyította, hogy még 11 km/h sebesség mellett és egymástól 5 cm-re elhelyezkedő kultivátorlemezek esetében sem volt jelentős a növényi károsodás mértéke. Szláma Zs. (2011) átfogó vizsgálatai során az RTK rendszerek elérhető pozicionálási pontosságát, valamint ezek mezőgazdasá-gi alkalmazhatóságát mutatta be. Munkájában a John Deere magyarországi egybázisos RTK bázisállomás és átjátszó (repeater) hálózatához csatlakozva vizsgálta az elérhető helymeghatározási pontosságot, különböző távolságokból kapcsolódva. Ez az un. RTK hálózat, valójában az RTK bázisállomások egyik csoportja, amely segítségével 2 cm pontos RTK korrekciós jel biztosítható a különböző precíziós mezőgazdasági alkalmazásokhoz. A bázisállomás távolságának és a pozicionálási pontosság összefüggésének elemzéséből kiderült, hogy a 2 cm-es pontosság csak abban az esetben volt biztosítható, ha a bázisállomás 5,61 km-nél nem volt távolabb. A mérés során több esetben természetes vagy mesterséges objektumok (pl. domborzat vagy épületek) kedvezőtlen hatásai is érvényesültek, ami a növelte a pontatlanságot. A kísérlet eredménye mezőgazdasági szempontból nagyon figyelemreméltó. Ugyanakkor meg kell említeni, hogy a méréseket álló helyzetben végezték, ami továbbra is különbözik a mezőgazdasági műveletekhez szükséges kinematikus helymeghatározástól.
Vizsgálataink célja nem az adott GPS vevő statikus vagy dinamikus pontosságának meghatározása volt. Elsődleges célunk a hidraulikus robotpilóta rendszerrel elérhető kormányzási pontosság vizsgálata volt valós szántóföldi (gyakorlati) körülmények között, különböző korrekciós jelek alkalmazásával.
Anyag és módszer
Kutatásunkban megvizsgáltuk a Trimble Autopilot hidraulikus robotpilóta rendszerrel felszerelt és Trimble FmX fedélzeti számítógép (FmX 1) által vezérelt New Holland T 6030 traktor kormányzási pontosságát. A 2008-ban gyártott traktor a kísérlet kezdetéig 2769 üzemórát dolgo-zott. A fedélzeti számítógép valamennyi funkcióját feloldottuk, így a vevőkészülék a különböző korrekciós forrásokat, valamint a GLONASS műhol-dak jeleit is tudta venni. A traktorba egy másik FmX monitort (FmX 2) is elhelyeztünk, amely egy Ag252 külső GPS vevő segítségével rögzítette a pozicionálási információkat. A tesztsávok kb. 200 m hosszú egyenes szaka-szok voltak, melyeket észak-dél, illetve kelet-nyugat irányban jelöltük ki. Az automatikus kormányzás pontosságát 10 ismétlésben végeztük el észak-dél (É-D), dél-észak (D-É), kelet-nyugat (K-Ny) és nyugat-kelet (Ny-K) irányokban. Az ismétléseket minden irányból elvégeztük, különböző GPS korrekciós jeleket használva, úgymint korrekció nélküli mérés (No CORR), EGNOS, OmniStar VBS, OmniStar HP, valamit saját bázisú RTK és GNSS hálózat esetén. A bázisállomás (Trimble AgGPS 450 RTK bázisállomás beépített rádióval), valamint a tesztterület tulajdonosa az adonyi Helianthus Növénytermelő, Szolgáltató és Kereskedelmi Kft., amely kb. 60 km-re fekszik Budapesttől délre. A bázisállomást 20-23 m magasságba telepítették fel egy silótorony tetejére, melynek rádiója 450 MHz-en, 12,5 kHz-es csatorna kiosztással és 2 W kimeneti teljesítménnyel üzemelt. A mérést az RTK bázisállomástól kb. 600 m-re végeztük el. A vizsgált terület GPS koordinátái a következők voltak: N 47.103214; E 18.86393. A bázisállomás nem volt képes fogni a GLONASS műholdak jeleit.
Anyag és módszer
Kutatásunkban megvizsgáltuk a Trimble Autopilot hidraulikus robotpilóta rendszerrel felszerelt és Trimble FmX fedélzeti számítógép (FmX 1) által vezérelt New Holland T 6030 traktor kormányzási pontosságát. A 2008-ban gyártott traktor a kísérlet kezdetéig 2769 üzemórát dolgo-zott. A fedélzeti számítógép valamennyi funkcióját feloldottuk, így a vevőkészülék a különböző korrekciós forrásokat, valamint a GLONASS műhol-dak jeleit is tudta venni. A traktorba egy másik FmX monitort (FmX 2) is elhelyeztünk, amely egy Ag252 külső GPS vevő segítségével rögzítette a pozicionálási információkat. A tesztsávok kb. 200 m hosszú egyenes szaka-szok voltak, melyeket észak-dél, illetve kelet-nyugat irányban jelöltük ki. Az automatikus kormányzás pontosságát 10 ismétlésben végeztük el észak-dél (É-D), dél-észak (D-É), kelet-nyugat (K-Ny) és nyugat-kelet (Ny-K) irányokban. Az ismétléseket minden irányból elvégeztük, különböző GPS korrekciós jeleket használva, úgymint korrekció nélküli mérés (No CORR), EGNOS, OmniStar VBS, OmniStar HP, valamit saját bázisú RTK és GNSS hálózat esetén. A bázisállomás (Trimble AgGPS 450 RTK bázisállomás beépített rádióval), valamint a tesztterület tulajdonosa az adonyi Helianthus Növénytermelő, Szolgáltató és Kereskedelmi Kft., amely kb. 60 km-re fekszik Budapesttől délre. A bázisállomást 20-23 m magasságba telepítették fel egy silótorony tetejére, melynek rádiója 450 MHz-en, 12,5 kHz-es csatorna kiosztással és 2 W kimeneti teljesítménnyel üzemelt. A mérést az RTK bázisállomástól kb. 600 m-re végeztük el. A vizsgált terület GPS koordinátái a következők voltak: N 47.103214; E 18.86393. A bázisállomás nem volt képes fogni a GLONASS műholdak jeleit.
A GNSS RTK hálózat használatakor a korrekció a hálózat budai bázisállomásáról érkeztek, egy Trimble AG3000 GPRS modem és Telenor SIM kártya segítségével. A tesztterület lejtő- és növényzetmentes volt, sem természetes, sem mesterséges objektum nem befolyásolta a GPS jeleket. Mivel a talaj nem frissen volt művelve természetesen tömörödött állapotú volt, így a traktor kerekei mintegy 5-6 cm mélységig süllyedtek a talajba. A rögök átlagos mérete 5-15 cm volt. A traktor 9. sebességfokozatban a 1 520 motorfordulat/perc mellett, átlago-san 6,4 km/h sebességgel haladt. Az FmX 1 fedélzeti számítógép vezérelte az automatikus kormányzási rendszert és egy un. „Track 3D” fájlban gyűj-tötte a mérés adatait, többek közt az aktuális pozíciót, a mérési pontok dátumát és pontos idejét, a HDOP értéket, a magassági, valamint az „Offline distance” értékeket, ami az aktuális AB-vonaltól való eltérését fejezi ki centiméterben. Ugyanezen adatok kerültek rögzítésre állandó saját bázisos RTK jel vétellel a másik fedélzeti számítógép (FmX 2) által. Ennek a dupla mérésnek a célja az volt, hogy csökkentsük a GPS jelek pontatlanságából eredő mérési hibákat. Ugyanazt a korrekciót használva robotpilóta vezérlésre ésadatrögzítésre, a kevésbé pontos korrekcióból adódó helymeghatározási hiba terhelné mindkét folyamatot, és így a kormányzás és helymeghatározás hibája nem lenne elkülöníthető. Különösen, hogy a különböző pontosságú GPS korrekciók különböző mértékben befolyásolnák a méréseket. Mivel az adatrögzítés azonos jel – és feltételezhetően a legpontosabb RTK jel – hasz-nálatával történt, ennek hatása az egyes mérések során azonosnak tekinthető.
A robotpilóta a gyári előírásoknak megfelelően lett bekalibrálva. Az adatgyűjtést akkor kezdtük el, amikor a traktor kormányhidraulika olaj hőmérséklete elérte az üzemi hőfokot, valamint az adott korrekciós jelek teljes mértékben konvergáltak. A konvergencia állapotát a Trimble AgRemote alkalmazáson követtük nyomon. A mérésekre 2011. augusztus 11-17-e kö-zött került sor.
A mérés során az adatok feldolgozását ArcGIS 10 és Microsoft Excel 2010 alkalmazással végeztük el. A feldolgozás során WGS 84 alapfelületű földrajzi (geographical) koordináta rendszerben dolgoztunk. A mérések közötti eltérés értékét, így decimális fokokban lehet csak meghatározni. A decimális fok formátumának méter mértékegységűvé való átalakításához az ArcGIS 10-ben a Spatial Analyst → Distance operator Raster műveletet használtuk. A térképi feldolgozásnál mm pontosságra törekedtünk, így ennek megfelelően határoztuk meg 0,0000001 decimális fokban a felbontást, ami az így kapott raszter egy pixelére vonatkoztatva 0,0008 m-t jelentett. A táblázatkezelőben végeztük el az átlag és a szórás számítását, valamint vizualizációs céllal a grafikonok elkészítését.
Eredmények
Kutatásunkban azt vizsgáltuk, hogy az automatikus kormányzási rendszer milyen pontosan tartja az általunk kijelölt A-B vonalat a 10 ismét-lés során. A méréssorozatot 4 irányban (észak-dél, dél-észak, kelet-nyugat, nyugat-kelet) és hat korrekció típus esetén végeztük el, vizsgálva a vonalvezetés pontosságát a különböző irányokban.
A FmX monitor által gyűjtött adatokat feldolgozásának első lépése, azok szeparálása, így láthatóvá váltak a különböző fordulók az egyes ismét-lésekben. Majd egy eloszlásdiagram alapján referenciaként kiválasztottuk az ismétlések tekintetében a legkisebb szórást mutató GNSS korrekciót. Így, a továbbiakban a GNSS mérések középvonalához viszonyítva határoztuk meg a többi korrekció eltérését az egyes irányokban ArcGIS 10 szoftverkörnye-zetben. A mérések szórásai mutatták, hogy a legpontosabbnak a GNSS, va-lamint a saját bázisú RTK értékek bizonyultak.
További vizsgálatokat végeztünk a mérés pontosságának megállapítására. Az FmX monitor által gyűjtött „Offline distance” értékek az aktuális A-B vonal pillanatnyi hibáit adták meg. Az egyes korrekciók Offline értékeinek szórása mutatja, a traktor A-B vonalon történő navigálását. Az eredmények alapján megállapítható, hogy a saját bázisállomás, a GNSS hálózati és az XP-HP korrekció esetében, K-NY és a NY-K irányban a szórás értékek alacsonyabbak voltak, mint D-É és É-D irányokba, míg a korrekció nélküli mérés (No CORR) esetében ez épp fordítva alakult (1. táblázat). Az OmniStar VBS esetében a K-NY irányú mérések szórása volt a legkisebb, míg az EGNOS korrekciónál K-NY irányba mértük a legnagyobb átlagos eltérési értékeket.
1. táblázat: Az ismétlések „Offline distance” értékeinek szórása az egyes korrekciók esetén
Kutatásunkban azt vizsgáltuk, hogy az automatikus kormányzási rendszer milyen pontosan tartja az általunk kijelölt A-B vonalat a 10 ismét-lés során. A méréssorozatot 4 irányban (észak-dél, dél-észak, kelet-nyugat, nyugat-kelet) és hat korrekció típus esetén végeztük el, vizsgálva a vonalvezetés pontosságát a különböző irányokban.
A FmX monitor által gyűjtött adatokat feldolgozásának első lépése, azok szeparálása, így láthatóvá váltak a különböző fordulók az egyes ismét-lésekben. Majd egy eloszlásdiagram alapján referenciaként kiválasztottuk az ismétlések tekintetében a legkisebb szórást mutató GNSS korrekciót. Így, a továbbiakban a GNSS mérések középvonalához viszonyítva határoztuk meg a többi korrekció eltérését az egyes irányokban ArcGIS 10 szoftverkörnye-zetben. A mérések szórásai mutatták, hogy a legpontosabbnak a GNSS, va-lamint a saját bázisú RTK értékek bizonyultak.
További vizsgálatokat végeztünk a mérés pontosságának megállapítására. Az FmX monitor által gyűjtött „Offline distance” értékek az aktuális A-B vonal pillanatnyi hibáit adták meg. Az egyes korrekciók Offline értékeinek szórása mutatja, a traktor A-B vonalon történő navigálását. Az eredmények alapján megállapítható, hogy a saját bázisállomás, a GNSS hálózati és az XP-HP korrekció esetében, K-NY és a NY-K irányban a szórás értékek alacsonyabbak voltak, mint D-É és É-D irányokba, míg a korrekció nélküli mérés (No CORR) esetében ez épp fordítva alakult (1. táblázat). Az OmniStar VBS esetében a K-NY irányú mérések szórása volt a legkisebb, míg az EGNOS korrekciónál K-NY irányba mértük a legnagyobb átlagos eltérési értékeket.
1. táblázat: Az ismétlések „Offline distance” értékeinek szórása az egyes korrekciók esetén
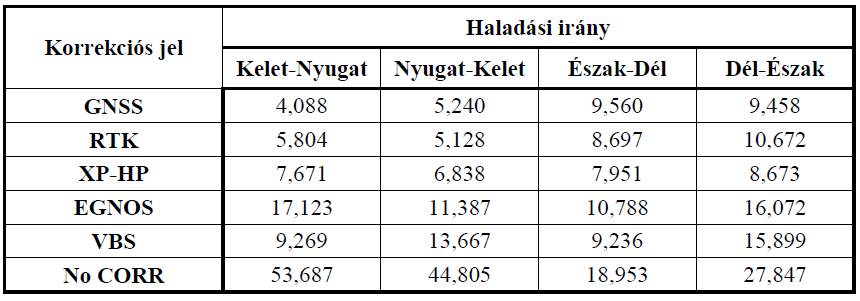
A két mérés pixel szintű egyeztetése során a GNSS ismétléseiből kalkulált egyenestől mért távolságok és az FmX által mért (Offline distance) távolságok közt kapcsolatot nem tudtunk kimutatni. Ugyanakkor az Offline distance és a GNSS mérések szórása hasonló képet mutatott, bár az É-D és D-É irányban a mérések nagyobb eltéréseket mutattak a K-NY, valamint NY-K irányokhoz képest.
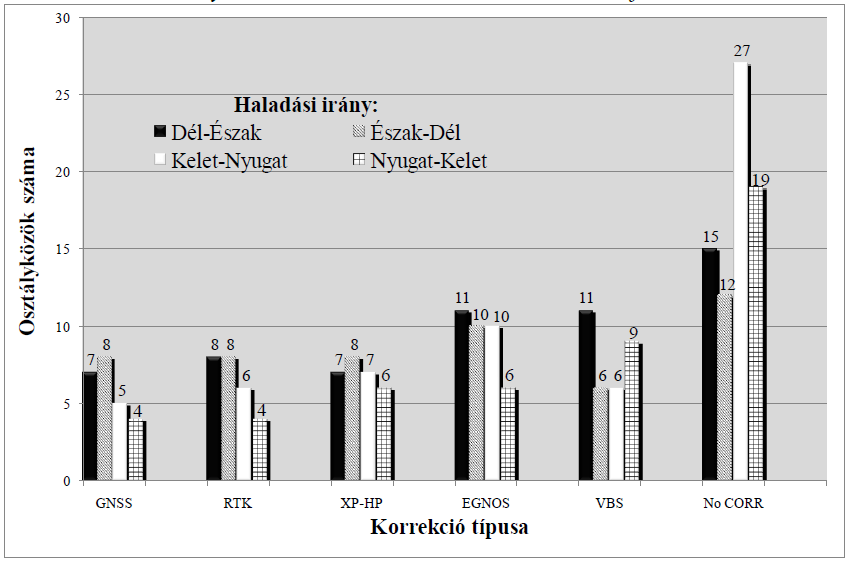
Továbbá tizedmilliméteres osztályközöket képezve meghatároztuk, hogy hány mérési tartományba esnek a GPS mérések, bizonyítva ezzel az egyre pontosabb jel általi hatékonyabb sorvezetést. Megállapítható, hogy minél pontosabb volt a korrekciós jel, annál kevesebb osztályközben találhatunk mért „Offline distance” értéket (1. ábra).
1. ábra: Az osztályközök száma a különböző korrekciós források esetében
Továbbá tizedmilliméteres osztályközöket képezve meghatároztuk, hogy hány mérési tartományba esnek a GPS mérések, bizonyítva ezzel az egyre pontosabb jel általi hatékonyabb sorvezetést. Megállapítható, hogy minél pontosabb volt a korrekciós jel, annál kevesebb osztályközben találhatunk mért „Offline distance” értéket (1. ábra).
1. ábra: Az osztályközök száma a különböző korrekciós források esetében
Következtetések
Vizsgálati eredményeink igazolják, hogy a különböző GPS jel korrekció nagymértékben befolyásolja az automatikus vezérlés pontosságát. Figyelemreméltó, hogy a GNSS RTK korrekció teljesítménye felülmúlta a saját bázisú RTK jelét, ami leginkább annak a ténynek köszönhető, hogy a GNSS RTK egy sokkal kifinomultabb és pontosabb technológia, szemben a saját bázisú RTK-val. Figyelemre méltó, hogy az OmniStar XP-HP jelek teljesítménye megközelítette a saját bázisú RTK-ét. Továbbá, az OmniStar VBS „Offline distance” értékei pontosabb eredményt hoztak valamennyi haladási irány tekintetében az EGNOS korrekcióhoz viszonyítva. Az egyes mezőgazdasági műveleteknek eltérő a precíziós igénye. Míg a műtrágyázásnál deciméteres, addig a vetésnél cm-es pontosság a megengedhető. A megfelelő korrekciós forrás kiválasztása és az adott munkaművelethez való igazítása tehát elengedhetetlen feltétele a precíziós mezőgazdasági gyakorlatnak. A nem megfelelő korrekció használta felesleges költségeket róhat a gazdára, és akár a növénytermesztés jövedelmezőségének csökkenését is okozhatja. További kutatásokat kívánunk folytatni annak érdekében, hogy a kapott eredmények alapján, ökonómiai szinten is megbizonyosodjunk a különböző korrekciók árainak és megtérüléseinek hatékonyságáról.
Köszönetnyilvánítás
A szerzők köszönetüket fejezik ki a Helianthus Kft-nek, akik az erőgépek és a teszt területet biztosították, az OmniStar-nak a VBS és HP korrekciós je-lek biztosításáért, valamint a Geotrade Kft-nek a GNSS RTK korrekciós jel biztosításáért.
Irodalomjegyzék
ABIDINE, A.Z.–B.C. HEIDMAN–S.K. UPADHYAYA– D.J. HILLS (2004): Autoguidance system operated at high speed causes almost no tomato damage. California Agriculture. 58 (1): 44-47.
ADAMCHUK, V.I.–T.S. STOMBAUGH–R.R. PRICE (2008): GNSS-based auto-guidance in agri-culture. Site-Specific Management Guidelines SSMG-46. International Plant Nu-trition Institute. Norcross, Georgia. 08/08.
BAIO, F.H.R. (2012): Evaluation of an auto-guidance system operating on a sugar cane harvester. Precision Agriculture. 13 (1): 141-147.
BLACKMORE, S. (1999): Developing the principles of precision farming. In: Proceedings of Agrotech 99. Barretos Institute of Technology. Barretos, Brazil. pp. 133-250.
EISSFELLER, B.–D. DÖTTERBÖCK– S. JUNKER–C.STÖBER (2011): Online GNSS data pro-cessing – status and future development. 53rd Photogrammetric Week. Stuttgart, Germany.
GYŐRFFY, B. (2000): A biogazdálkodástól a precíziós mezőgazdaságig. Agrofórum. 11 (2): 1-4.
HUDSON, G.–R. SHOFNER–G. WARDLOW–D. JOHNSON (2007): Evaluation of three tractor-guidance methods for parallel swathing at two field speeds. The Student Journal of the Dale Bumpers College of Agricultural, Food and Life Sciences Discovery. 8: 61-66.
NEMÉNYI, M.–Zs. PECZE–F. PETRÓCZKI (1998): Agrárműszaki feladatok a térinformatikai adatbázis felvételénél illetve annak bővítésénél. VII Térinformatika a felsőoktatás-ban szimpózium elıadások összefoglalói. Budapest. pp. 94-98.
NOACK, P.O.–T. Muhr (2008): Integrated controls for agricultural applications – GNSS enabling a new level in precision farming. In: 1st International Conference on Ma-chine Control & Guidance. Zurich. 24-26. June 2008. pp. 1-8.
SZLÁMA, Zs. (2011): RTK műholdas irányítórendszer pontosságának elemzése, a pontosság változása a környezeti hatások és jelismétlő alkalmazásának függvényében. Dip-lomadolgozat. pp. 63.
TAMÁS, J. (2001): Precíziós mezőgazdaság. Mezőgazdasági Szaktudás Kiadó, Budapest. pp. 144.
TAMÁS, J.–Cs. LÉNÁRT (2003): Terepi térinformatika és a GPS gyakorlati alkalmazása. DE-ATC, Debrecen. pp. 199.
TIBERIUS, C.–E. VERBREE (2004): GNSS positioning accuracy and availability within Loca-tion Based Services: The advantages of combined GPS-Galileo positioning. In: 2nd ESA Workshop on Satellite Navigation User Equipment Technologies, NAVITEC '2004. ESTEC Noordwijk. pp. 1-12.
TUCHBAND, T. (2008): Nagy pontosságú abszolút GPS helymeghatározási technika pontos-sági vizsgálata. In: Doktori kutatások a BME Építımérnöki Karán. pp. 12.
Vizsgálati eredményeink igazolják, hogy a különböző GPS jel korrekció nagymértékben befolyásolja az automatikus vezérlés pontosságát. Figyelemreméltó, hogy a GNSS RTK korrekció teljesítménye felülmúlta a saját bázisú RTK jelét, ami leginkább annak a ténynek köszönhető, hogy a GNSS RTK egy sokkal kifinomultabb és pontosabb technológia, szemben a saját bázisú RTK-val. Figyelemre méltó, hogy az OmniStar XP-HP jelek teljesítménye megközelítette a saját bázisú RTK-ét. Továbbá, az OmniStar VBS „Offline distance” értékei pontosabb eredményt hoztak valamennyi haladási irány tekintetében az EGNOS korrekcióhoz viszonyítva. Az egyes mezőgazdasági műveleteknek eltérő a precíziós igénye. Míg a műtrágyázásnál deciméteres, addig a vetésnél cm-es pontosság a megengedhető. A megfelelő korrekciós forrás kiválasztása és az adott munkaművelethez való igazítása tehát elengedhetetlen feltétele a precíziós mezőgazdasági gyakorlatnak. A nem megfelelő korrekció használta felesleges költségeket róhat a gazdára, és akár a növénytermesztés jövedelmezőségének csökkenését is okozhatja. További kutatásokat kívánunk folytatni annak érdekében, hogy a kapott eredmények alapján, ökonómiai szinten is megbizonyosodjunk a különböző korrekciók árainak és megtérüléseinek hatékonyságáról.
Köszönetnyilvánítás
A szerzők köszönetüket fejezik ki a Helianthus Kft-nek, akik az erőgépek és a teszt területet biztosították, az OmniStar-nak a VBS és HP korrekciós je-lek biztosításáért, valamint a Geotrade Kft-nek a GNSS RTK korrekciós jel biztosításáért.
Irodalomjegyzék
ABIDINE, A.Z.–B.C. HEIDMAN–S.K. UPADHYAYA– D.J. HILLS (2004): Autoguidance system operated at high speed causes almost no tomato damage. California Agriculture. 58 (1): 44-47.
ADAMCHUK, V.I.–T.S. STOMBAUGH–R.R. PRICE (2008): GNSS-based auto-guidance in agri-culture. Site-Specific Management Guidelines SSMG-46. International Plant Nu-trition Institute. Norcross, Georgia. 08/08.
BAIO, F.H.R. (2012): Evaluation of an auto-guidance system operating on a sugar cane harvester. Precision Agriculture. 13 (1): 141-147.
BLACKMORE, S. (1999): Developing the principles of precision farming. In: Proceedings of Agrotech 99. Barretos Institute of Technology. Barretos, Brazil. pp. 133-250.
EISSFELLER, B.–D. DÖTTERBÖCK– S. JUNKER–C.STÖBER (2011): Online GNSS data pro-cessing – status and future development. 53rd Photogrammetric Week. Stuttgart, Germany.
GYŐRFFY, B. (2000): A biogazdálkodástól a precíziós mezőgazdaságig. Agrofórum. 11 (2): 1-4.
HUDSON, G.–R. SHOFNER–G. WARDLOW–D. JOHNSON (2007): Evaluation of three tractor-guidance methods for parallel swathing at two field speeds. The Student Journal of the Dale Bumpers College of Agricultural, Food and Life Sciences Discovery. 8: 61-66.
NEMÉNYI, M.–Zs. PECZE–F. PETRÓCZKI (1998): Agrárműszaki feladatok a térinformatikai adatbázis felvételénél illetve annak bővítésénél. VII Térinformatika a felsőoktatás-ban szimpózium elıadások összefoglalói. Budapest. pp. 94-98.
NOACK, P.O.–T. Muhr (2008): Integrated controls for agricultural applications – GNSS enabling a new level in precision farming. In: 1st International Conference on Ma-chine Control & Guidance. Zurich. 24-26. June 2008. pp. 1-8.
SZLÁMA, Zs. (2011): RTK műholdas irányítórendszer pontosságának elemzése, a pontosság változása a környezeti hatások és jelismétlő alkalmazásának függvényében. Dip-lomadolgozat. pp. 63.
TAMÁS, J. (2001): Precíziós mezőgazdaság. Mezőgazdasági Szaktudás Kiadó, Budapest. pp. 144.
TAMÁS, J.–Cs. LÉNÁRT (2003): Terepi térinformatika és a GPS gyakorlati alkalmazása. DE-ATC, Debrecen. pp. 199.
TIBERIUS, C.–E. VERBREE (2004): GNSS positioning accuracy and availability within Loca-tion Based Services: The advantages of combined GPS-Galileo positioning. In: 2nd ESA Workshop on Satellite Navigation User Equipment Technologies, NAVITEC '2004. ESTEC Noordwijk. pp. 1-12.
TUCHBAND, T. (2008): Nagy pontosságú abszolút GPS helymeghatározási technika pontos-sági vizsgálata. In: Doktori kutatások a BME Építımérnöki Karán. pp. 12.
